![]()
| 型号 | RDM伺服驱动模块 |
| 供电电压 | +18-70VDC |
| 额定电流 | 15A |
| 峰值电流 | 30A |
| 额定电压 | 48VDC |
| 最大功率 | 1000W |
| 中空直径 | 9mm |
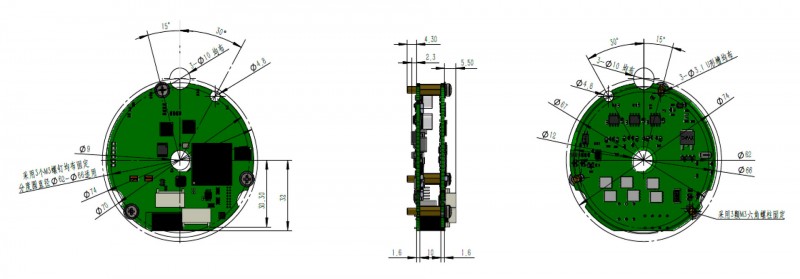
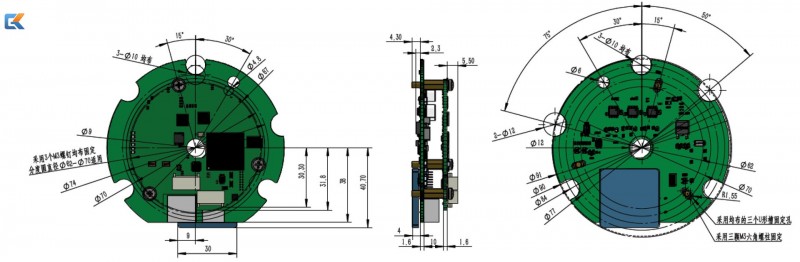
| 外形尺寸 | 小尺寸:74*21mm 大尺寸:91*21mm |
| 重量 | 小尺寸:50g 大尺寸:60g |
| 通讯方式 | EtherCAT、 CANopen、RS232 |
| 反馈方式 | 主编码器:松下增量编码器(A 格式),SSI,BISS(差分或单端),EnDat,Absolute A,多摩川、松下绝对值编码器 A,尼康、三洋绝对值编码器 A |
| 通讯方式 | EtherCAT、CANopen、RS232 |
| 数字IO | 1个数字量输入,1个数字量输出 |
| 模拟量IO | 2个模拟量输入 |
| 温度 | 正常运行:0-45℃,存储:-40℃-85℃ |
| 湿度 | 0% ~ 95%,无结露 |
| 污染 | 污染等级 2 |
| 环境 | IEC68-2: 1990 |
【主要特性】
![]()
控制模式:
位置/速度/转矩周期同步(CSP,CSV,CST)
运动序列、点到点、PVT
电子齿轮、凸轮
位置、速度、转矩曲线控制模式
运行模式:
独立可编程
或分布式网络控制
控制命令:
CoE(CAN application layer over EtherCAT)/CANopen
独立可编程控制:
简单、直观的编程工具
32 个可编程运动序列
可编程优先级,可由数字输入或 32 个寄存器选择与执行运动序列
通过 RS232 通信可访问 32 个寄存器
可编程上电自动运行程序
可编程运动错误响应类型
包含以下标准运动控制功能:
运动(位置、速度、转矩、凸轮、回原点)
等待(输入、延时、位置、运动完成、参数或事件)
条件跳转
设置增益、限制、跟踪窗口
设置输出、位置触发输出
使能或禁止驱动器
数学与逻辑运算
设置运行模式
设置、读取参数变量
速度单级滤波
通信控制:
RS-232
EtherCAT/CANopen
输入输出:
1 数字量输出用于控制抱闸
1 通用数字量输出
1 通用数字量输入口
反馈:
主编码器:
松下增量编码器(A 格式)
SSI,BISS(差分或单端)
EnDat,Absolute A
多摩川、松下绝对值编码器 A
尼康、三洋绝对值编码器 A
第 2 编码器:
差分或单端正交增量编码器,最大速率 5M line/s(4 倍频后 20M)
【Techmotion配置与监控软件】
![]()
基于 Windows 操作系统
电机与传感器参数配置
调整 PID 参数
试运行
示波器实时分析评估
错误报警记录
参数状态监控
灵活快捷,简单易用
【机械尺寸外形图】
![]()